- RF AMPLIFIER
- RF POWER GENERATOR
- MATCHING BOX
- RF EQUIPMENT
- RF COMPONENT
- RF SYSTEM
- NMR SPECTROMETER
- NMR EQUIPMENT
- 3-9-2 IMAIZUMI, FUJI, SHIZUOKA,
- 417-0001 JAPAN
- THAMWAY CO., LTD
| IISO9001 acquired. |
 |
| January, 2005 |
| ■RF SYSTEMS FOR PARTICLE ACCELERATORS |
| In particle accelerators, it is necessary to control the amplitude and phase of the high frequency signal supplied to the exciting resonator in order to accelerate the ion beams efficiently and in a stable way at a high precision rate. THAMWAY's products have shown good results in this field. |
Design and manufacture range
|
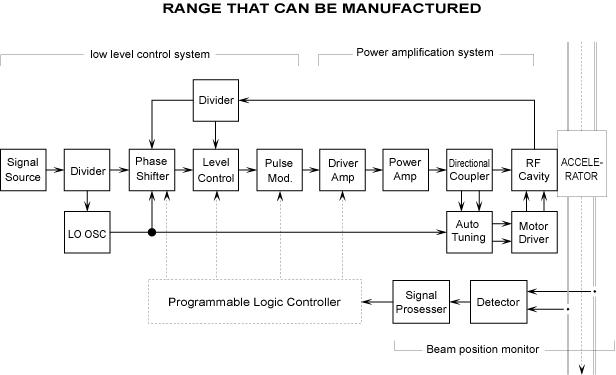 |
| Low-level control system | |
| Signal generator | Generates a stable standard RF signal. |
| Power divider | For RF signals. |
| Local oscillator | Generates a local signal for a phase shifter and an sutomatic tuner based on a signal from a signal generator. |
| Phase adjuster | Compares a standard signal with a pick-up signal from a cavity or other source in phase and outputs a feedback controlled RF signal for phase stability of the cavity. |
| Amplitude adjuster | Compares standard signal voltage with a pick up signal voltage from a cavity or other source and outputs a feedback controlled RF signal for voltage stability of the cavity. |
| Automatic tuner | Performs comparison operation between forward waves and reflection waves, and outputs a control signal for tuning the cavity. |
| Tuning controller | Converts a control signal from an automatic tuner to a motor drive signal, and outputs it for tuning the cavity. |
| Power amplifier system | |
| RF amplifier | Amplifies a low level signal from a phase adjuster and an amplitude adjuster up to few hundreds of watts. |
| High power amplifier | If there is a amplifier in the post stage, the amplifier is used as a driver for it. Otherwise, it is used for direct drive in a 200kW class accelerator. |
| Directional coupler | Monitors amplitude and phase information of forward waves or reflection waves from the cavity at a low level. |
| Beam monitoring system | |
| Position information detection device | Obtains position information on the beam passed through an accelerator beam line. |
| Monitor control | Beam position information is processed and a control signal and the position information value are sent to the host system. |